生徒が持っている可能性を伸ばしたい。これは指導者誰もが持っている願いであると思う。
そのために教師は学習環境を整備し,生徒が自信を持って新たな課題に挑戦できる「仕込み」を行う。
そして充分に「仕込まれた」授業の中で生徒が自ら学び,主体的に活動することによって「新たな発見」「新しい自分に出会う」。
つまり,学ぶ喜びやすばらしさを,観念的ではなく体感的に身につけるのである。
そのようにして身に付いた知識や技能こそ本当の 「生きる力」であると私は考える。
本研究ではロボットコンテストという題材を通じ,自ら学ぶ生徒の育成を目指したい。
これまでに私が行ってきたロボットコンテストにおける研究・実践はコンテスト本番の授業展開や,一連の取り組みを終えての生徒の学習成果が主であったので,今回は途中の取り組み過程における研究としてみた。
研究の内容は次の2つである。
- 編班成におけるRDシステムの試み。
- 取組段階によって変容する目標から生徒の向上過程を知る。
対象は3年生の選択授業(前期25人,後期25人の計50人)を対象に行った。
まず,本研究は班別学習として一つの作品を複数のメンバーで作り上げる授業を前提としている。その前提の上で,グループ活動の中から自ら学ぶ生徒を育成するための大きな土台となる班のシステムを考えるのに(1)を研究した。
もう一つ別の観点から研究した(2)についてであるが,取り組み段階ごとに生徒に書かせた目標におもしろい変化が見られたので,そこから生徒の向上過程を探ってみた。
これら(1)(2)は学ぶ生徒の育成を考える,おおきな足がかりになるであろうと考え本研究を行った。
技術の授業で班の係といえば「班長,工具係,美化係・・・」といった係がよく用いられる。
このような係は,もともと目標が個々に違う個人作品を作らせる際,いかに班の実習を効率よくスムーズに行わせるためのいわば管理目的の係分担である。もちろんこのような係も必要であるが今回の研究では少し視点をかえて,管理目的の係ではなく,一つの物事を班員全員で達成する事を第一の視点をおいた係分担を考えた。ここで,それを達成するためのシステムとして,Rotating Dutuy System と名付けた体系(以後はRDシステムとする)を試みた。
RDシステム(Rotating Duty System)とは
- 班員は3人
- 3つの異なる視点の会議をもつ。
- 3人はいずれかの会議のチーフとなり,ローテーションで会議を取り仕切る。
このシステムは,3人全員がチーフであり,会議の視点ごとにチーフがローテーションのように変わることで全ての話し合いが行われることである。
班員の人数を3人に限定したのは今までの経験上,3人以上の場合は班内で2つのグループに別れてしまう場合が多い。また多数決で結果が出せる奇数グループの最少形なので,物事を話し合う場合,非常にバランスが良く安定した人数であると判断した。
今回の取り組みでは3人の班員にそれぞれ,
「設計担当チーフ」,
「製作担当チーフ」,
「操縦担当チーフ」の役割を与え,設計・製作・操縦という議題に応じて会議のまとめ役を行わせた。例えばA君,B君,C君の3人の班で,A君が「設計担当チーフ」,B君が「製作担当チーフ」,C君が「操縦担当チーフ」の場合,次のような図式になる。
(図1)
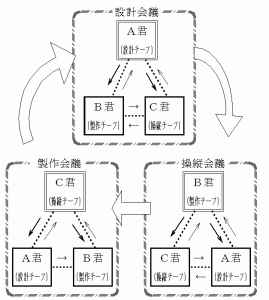
RDシステム( Rotating Duty System )
Rotating = 回転する・循環する
Duty = 義務・任務
System = 体系
設計担当チーフは設計会議を開き,班員から出た意見をまとめ,最終的にロボットの機構からデザインまでの設計を行う。
初めの設計ではほとんどの場合うまくいかず,途中で設計を変更,あるいは改良する場合がほとんどであり,会議は頻繁に行われる。実際の生徒の活動では時間の関係上,設計図などは難しく,イメージを口頭で指示する場合がほとんどである。ロボットの完成段階になれば,操縦担当の意見が多く反映される。
製作担当チーフは製作会議を行い,設計通りのロボットを作るための作業の段取り,作業分担などを話し合う。その際,「君は配線とはんだ付け等の電気部分を,君はシャーシー関係の加工を,君は機構の部分の組み立てを・・・・」等のように効率よく作業させるための分担などを行う。頻繁に行わせ,全員が製作作業に関われるようにする。
操縦担当チーフは操縦会議を開く。会議ではロボットをどのように操ればコンテストに勝てるか,強い効率の良い動きが行えるかを考える。作戦会議を含んだ,ロボットを動かすための実践的な会議である。
また,操縦者からの改良点などの要求があり,設計会議や製作会議に移行する場合も多かったようである。
(図2)
実習の初めの段階では教師の指示で1時間に1回5〜10分程度の会議を行わせ,会議の習慣を作る。班活動が波に乗れば,会議を行う時期も班に任せる。
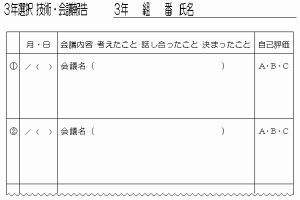
会議を行った場合は(図2)のような会議報告書を提出させる。報告のための会議にならないように,報告書は出来るだけ簡潔に書かせるようにする。
報告書の例は(図3)〜(図5)である。
(図3)
(図4)
(図5)
-----
RDシステムの成果-----
会議・実行・実践・ローテーション の一連を繰り返す事によって完成度の高いロボットへと仕上がってくる。一人のリーダーを頂点とする階層的なトップダウンシステムでは正しい結果を生む明確な方向性がある場合はとても効率よく合理的に進めることが出来るが,ロボットコンテストのような試行錯誤を繰り返しながら方向性を見つける場合には不向きである。
今回試みたRDシステムでは,チーフがローテーションすることで生徒が自分の役割をしっかり理解し責任がもてるということと,話し合いの視点がはっきりすることが顕著に現れた。今までの感想でよく見られた「班員で材料を眺めているだけで1時間が終わった。」「○○君が何もしないでぼーっとしていた。」「○○君が一人で勝手に作って僕らにやらせてくれなかった。」というような感想が格段に減った。
RDシステムが軌道に乗るまでは教師の声かけが必要であるが,軌道に乗れば,指導者側の想像を超えるほど自分たちで一つの目標に向かって生き生きと活動できる体系であると感じた。
今回,ロボット製作前・ロボット製作途中(中間発表終了時)・ロボット完成後(練習試合終了時)と3段階にかけて,「目標」を書かせた。その目標を分類・分析するとおもしろい変化が見られたのでそれらをまとめてみた。
| ロボット製作前の目標 |
| A. 優勝する。競技に勝つ |
34% |
| B. ロボットを動かす |
20% |
| C. 協力する |
16% |
| D. 個性のあるロボットをつくる |
12% |
| E. 楽しむ |
10% |
| F. その他,少数意見 |
8% |
ロボット製作前の目標は大きく分けて上記のA〜Fのように分類された。特に目立つのは
「優勝」・
「全勝」・
「絶対負けない」・・・等。
「優勝する」「競技に勝つ」といったAに分類される目標が一番多かった。それはロボサッカーという対戦競技のネーミングにより,「ロボットを作る。」という意欲より,
「他のチームに勝ちたい。」という意欲が先行していると考えられる。
次に
「ロボットが動くように頑張る」「とにかく動かしたい」といったBに分類される目標も多かった。「ほんとに僕たちにロボットが作れるのか。」といった半信半疑の生徒も多くいたようである。
「協力する」という目標は,よくある学級目標や班目標で出てくる感覚ではないかと推測する。後半RDシステムが機能し,協力して作業するようになった時期にはこの目標は消えている。
この段階ではまだ。ロボットを作るということがイメージ出来ない生徒が多いようで,実習開始前の目標は,漠然とした抽象的な者が多い。
| ロボットの製作途中(中間発表時)の目標 |
| A. しくみ部分の性能の向上させる |
30% |
| B. 完成度・安定度を向上させる |
26% |
| C. 優勝する |
14% |
| D. 外観を良くする |
12% |
| E. 走行のスピードを高める |
10% |
| F. その他,少数意見 |
8% |
この段階では,班活動も軌道に乗り,ロボットも完成しつつある状態である。目標は上記のA〜Fのように分類された。多かったのはAに分類される,しくみ部分の性能の向上を目指した目標が目立つ。例としては
「ボールを掴む装置を考えたい」「家からモータを持ってきてもう1つの別のしくみを考える」などである。これは,実際に製作していく中でものづくりの楽しさに目覚め,「勝つ」ということ以上に,
「性能の良いロボットをつくりたい」という知的好奇心が芽生えてきたことを表す。初期段階に比べ,実際に作ってみて感じた体感的な関心・意欲である。
次に多かったのはBに分類される完成度・安定度を向上を目指したものである。例としては
「タイアが空回りして動きが悪いので直したい」「すぐに倒れるので水平板を付けてマシンを安定させたい」等である。製作途中でなかなか思い通りに動いてくれない苦労が目標によく表れている。
この時期の目標の特徴としては具体的なしくみや部分を取り上げているものが多い。
| ロボット完成後(練習試合後)の目標 |
| A. 走行のスピードを高める |
28% |
| B. ロボットの重量を上げる |
22% |
| C. 完成度・安定度を向上させる |
16% |
| D. 優勝する |
12% |
| E. しくみ部分の性能の向上させる |
10% |
| F. 電気部分の性能を向上させる |
8% |
| G. その他,少数意見 |
4% |
この段階はロボットが完成し練習試合を行った後である。目標は今までとがらりと変わり
「スピードアップ」や
「重量アップ」など,一見すると単純な目標に逆戻りしたように感じるが,これには大きな意味があった。実際に練習試合をして生徒が感じたことは,押すか押されるかで勝敗が大きく左右された事である。優れた機構のロボットが,何も機構のない走るだけのロボットに負けることがあるのである。いくら機構が優れていても,ロボット同士がぶつかり合うサッカーという競技の特性上,当たり負けをすれば弱いのである。そこで生徒が感じるのは,「スピードが遅いのであたり負けをするのか?」「重量が軽いから押されるのか?」という疑問である。あたり負けをするかしないかは単純な物体で考えると運動エネルギーに左右される(運動エネルギー=質量×速さ2 )。運動エネルギーは理科では3年の2学期に既に習っているが,生徒はその知識とは全く結びつかず,自ら体感的に感じたものである。
目標の推移を簡単にまとめると
「 抽象的 」→
「 具体的 」→
「 実践的 」と言える。目標の変容から見えてきたものは,生徒達は試行錯誤を繰り返して身に付いた知識や技能を駆使し,学ぶ喜びやすばらしさを,体感的に身につけるということである。
今回はロボットコンテストにおける途中の取り組み過程における研究として(1)編班成におけるRDシステムの試みと,(2)取り組み段階によって変容する目標から生徒の向上過程を知る,という2点について研究してみた。RDシステムは今後も改良を加えながら引き続き取り組み,さらなる可能性を探っていきたい。また今回の目標分析では,取り組み段階ごとの目標の変化から生徒の様々な向上過程を知ることが出来た。
ロボットコンテストは,学ぶことの喜びやすばらしさを,観念的ではなく体感的に身につけさせ,「生きる力」を育むすばらしい題材であると私は考える。
本研究で取り組んだことを一つのヒントにし,今後もロボットコンテストを通じてそれらを研究・実践し,自ら学ぶ生徒の育成を目指したい。